Recensione: GPTOYS H2O Aviax (drone resistente all’acqua)

GPTOYS H2O Aviax
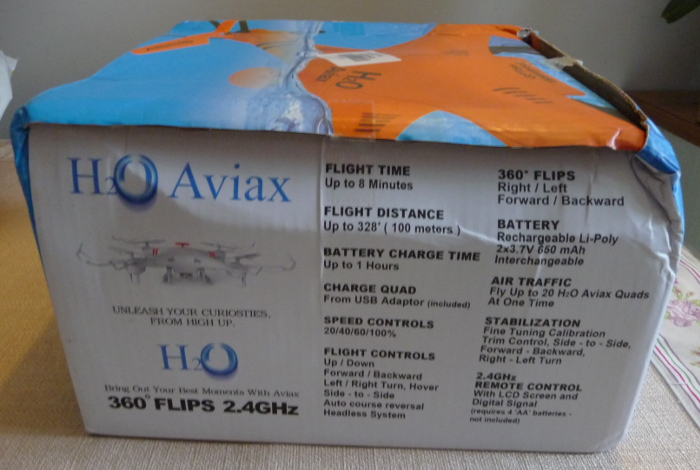
Grazie a GearBest che ci ha spedito un drone H2O Aviax della GpToys possiamo eseguire un test completo su questo drone capace di resistere all’acqua come si può vedere dalla sua scheda prodotto.
Ricordo che c’è un concorso in atto per regalare un altro drone Aviax ad un fortunato di voi.
Pacco
Il pacco spedito dalla Cina con corriere DHL è arrivato a destinazione in una settimana dall’ordine.

All’interno della resistente busta di nylon c’era direttamente la scatola del drone.

La scatola di cartone (non molto spesso come materiale) si apre con un coperchio nella parte superiore, ed era un po schiacciato sui lati.
Sicuramente con un cartone più spesso o comunque con un rinforzo nella zona del coperchio la scatola si sarebbe deformata molto meno, ma come vedremo tra un attimo ciò non ha influito sul contenuto.
Contenuto
Sollevando il coperchio troviamo nella parte superiore il drone smontato e le protezioni delle eliche che escono sui lati.

Sollevando il cartone interno e rovesciandolo notiamo che il drone è saldamente ancorato ad esso tramite due fili di ferro, pertanto la possibilità che durante il viaggio subisca dei traumi è ridotta al minimo.

Nella parte sottostante c’è un ulteriore scatola che contiene il radiocomando e hai lati ci sono vari sacchetti contenenti tutto il resto del materiale.

Troviamo infatti, oltre al radiocomando, un cacciavite con viti, 8 eliche, il caricabatteria usb, una batteria di scorta, i due carrelli di atterraggio, il manuale e un pezzo di antenna del radiocomando.

Radiocomando
Il radiocomandando si presenta subito molto bene perché le leve sono tarate per il mode 2: quella a sinistra è libera dai movimenti mentre quella di destra ritorna sempre al centro.

Sebbene sia di plastica risulta uno dei migliori provati quanto a leve e pulsanti, inoltre il display LCD da le indicazioni perfette. Tranne per i pulsanti e le leve tarate differentemente è grossomodo uguale a quello del Syma X5C.

Quello che non di spiega è la necessità di inserire l’antenna di plastica che si trovava in uno dei sacchetti sul radiocomando, dato che risulta essere solo un fattore estetico non influendo sulla ricezione.

Aprendo il comando si vede infatti che il filo dell’antenna è lungo un paio di centimetri e in ogni caso è troppo corto per farlo arrivare all’antennina.
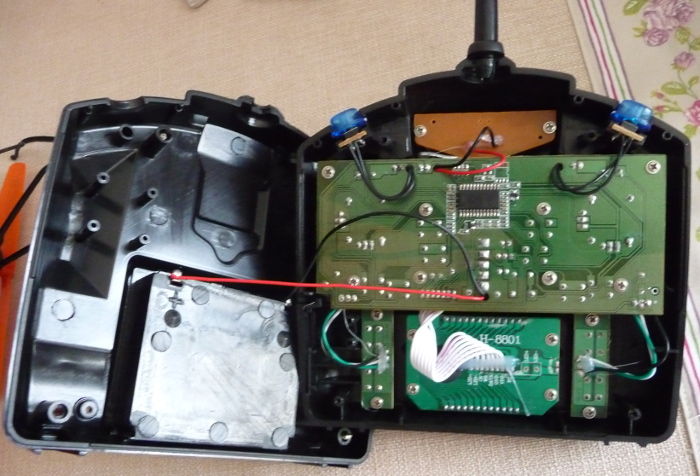
Anche internamente il comando presenta una buona fattura e realizzazione.
Montaggio
Per rendere il drone pronto al volo dovremo passare alla fase di montaggio che richiederà una ventina di minuti. Notiamo per prima cosa che una batteria si trova già all’interno del vano plastificato posto sul fondo del modello.

Per prima cosa procediamo con l‘inserire le protezioni alle eliche. Esse hanno una vite da avvitare centrale e due inneschi in plastica ai lati da inserire su due fori: è essenziale che tutto si incastri fino all’ultimo millimetro prima di avvitare la vite, altrimenti ci sarà il rischio che l’elica tocchi la protezione (bisogna fare parecchia pressione per inserire il tutto).
Durante questa fase ci accorgiamo di un problema di montaggio.

La sagoma superiore in plastica che si incastra con la parte inferiore tramite due ganci della zona del motore risultavano non correttamente inserita su 3 lati di 8.

Questo deturpa l’estetica del velivolo più che variarne le caratteristiche, pertanto per sistemarle bisogna svitare la vite che si trova all’estremità dell’ala in modo da poter far entrare le sedi in modo corretto.
Potrebbe trattarsi comunque di un caso isolato, in ogni caso date un occhio al vostro drone se è o meno esente dal difetto estetico.

Per continuare col montaggio si devono inserire i due carrelli di atterraggio nei 4 fori ad incastro appositi. Attenzione a mettere i carrelli con la giusta direzione (ovvero verso l’esterno), perché li potreste anche inserire per errore verso l’interno dato che le sedi sono perfettamente simmetriche.

Per quanto riguarda l’elica bisogna togliere la graffetta che tiene l’ingranaggio che va al motore, inserire l’elica e poi avvitare la piccola vite che si trova all’interno del sacchetto. Questo è scritto molto bene nel manuale, ma di primo acchito verrebbe naturale reinserire la graffetta nel foro con l’elica, cosa che però porterebbe a delle vibrazioni sebbene il drone possa volare ugualmente, come vediamo in questa foto:


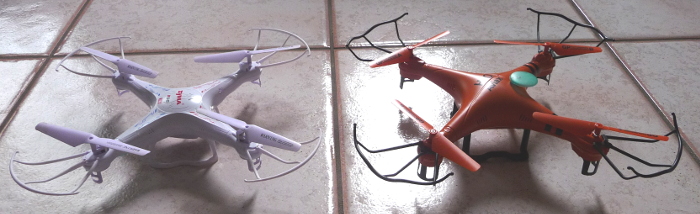
Ora che il drone è montato, un confronto con il Syma 5XC è d’obbligo:

Quello che balza all’occhio è che l’H2O è leggermente più grande e più alto grazie al carrello di atterraggio più corposo.
Pronti via
Per iniziare la prova bisogna effettuare il binding col radiocomando. Diciamo subito che la procedura è differente da come avviene normalmente negli altri droni.
Per prima cosa va accesso il radiocomando che inizierà a lampeggiare ed emettere dei bip, poi va inserita la batteria nel drone: le luci del drone lampeggiano e dopo pochi secondi un bip più lungo dichiara che il binding è completato. Secondo il manuale i bip continui all’avvio stanno ad indicare che le batterie inserite (4 di tipo AA) hanno un voltaggio inferiore a 4,5V, ma con tester alla mano la tensione era superiore a 5V anche sui circuiti interni al radiocomando.

Le luci del drone saranno ora non più intermittenti, oppure saranno spente nel caso in cui ci fossimo dimenticati di portare la leva del gas a fine corsa prima di fare il binding (portando la leva a zero, le luci torneranno accese). A questo punto dando gas, il drone risponderà ai comandi.

Quello che a volte capita è che inserendo la batteria nel drone, le luci verdi lampeggino mentre quelle rosse dopo un lampeggio rimangano spente. In questa situazione non c’è verso che avvenga il binding col radiocomando.
Nel manuale non dicono nulla di questo comportamento quindi potrebbe trattarsi o di una procedura non corretta di accensione oppure di un difetto (contatto elettrico fallace) nella scheda.

Riprovando più volte a togliere ed inserire la batteria, comunque le luci poi tornano normali e si può procedere correttamente al binding. Altra cosa, se si accende prima il drone e poi il radiocomando, sembra che il binding non avvenga mai, quindi appare essenziale prima accendere il radiocomando e poi il drone.
Questo è forse il punto più seccante, perché se si spegne per qualche motivo il radiocomando, poi va spento il drone e non basta riaccendere il radiocomando per effettuare il binding.
Prova
Ora che tutto è pronto si può volare. Nel radiocomando il pulsante in alto a destra funge da interruttore per variare la velocità dal 20%, 40%, 60% e 100% (indicazione riportata nel pannello LCD). Possiamo anche accendere o spegnere i led sempre usando un pulsante vicino al pannello.
Il drone vola molto stabile e sembra di pilotare un Syma X5C, con la differenza che potendo variare ben 4 velocità si può scegliere meglio quella più indicata per il proprio stile di volo.
Sul radiocomando un pulsante serve per comandare una videocamera per scattare foto oppure riprendere video (da scegliere all’avvio quale modalità usare). La telecamera va comperata a parte ed è quello che manca al momento per sentire di avere un X5C tra le mani.
L’altro pulsante del radiocomando posto a sinistra server per fare le evoluzioni 3D, cosa che il drone esegue senza problemi.
Gli altri due pulsanti servono invece per attivare la modalità Cruise e l’Headless mode.
La prima dovrebbe essere una modalità in cui il drone registra per 40 secondi i propri spostamenti e poi li può riprodurre fedelmente, con la possibilità poi di tornare alla posizione di partenza. Il secondo è invece la classica modalità headless di volo facilitato.
Al momento però non siamo riusciti ad usare queste due modalità con successo. Nell’headless mode il drone sembra non rispondere ai spostamenti laterali e si limita ad andare avanti e indietro (anche facendo il reset del drone con la procedura indicata nel manuale non c’erano cambiamenti). Nella prima modalità non si capisce quando registra i movimenti e quando poi li riproduce (dovrebbe registrarli in continuazione prima di attivare la modalità).
Sicuramente con ulteriori prove si potrà capire meglio il loro funzionamento che non è ben specificato nel manuale, ma abbiamo voluto concentrarci maggiormemte nella prova dell’acqua per appurare se realmente il drone ne è resistente.
Dato il periodo di siccità i corsi d’acqua limitrofi sono completamente asciutti, pertanto abbiamo optato per una prova indoor per poter eseguire un test (anche se le riprese sono state più problematiche).
Dopo aver riempito un tino per 10 cm, abbiamo lasciato cadere in acqua il drone per poi dare gas per vedere se si rialzasse. Nonostante la maggior difficoltà, sopratutto nella parte in cui un rotore era più sommerso degli altri, alla fine il drone lentamente si è staccato dall’acqua ed ha ripreso a volare.
Il drone ha continuato per un pezzo poi a perdere acqua per le fessure di cui è dotato e naturalmente a volare come se nulla fosse stato.
Qual’è dunque il suo segreto?
Smontaggio
Per rispondere alla domanda abbiamo dovuto smontare il drone, cosa che richiede di svitare almeno 25 viti sparse in vari punti.

La scocca è formata dalla parte inferiore completa, da una superiore che termina nei braccetti e la parte che copre i rotori.
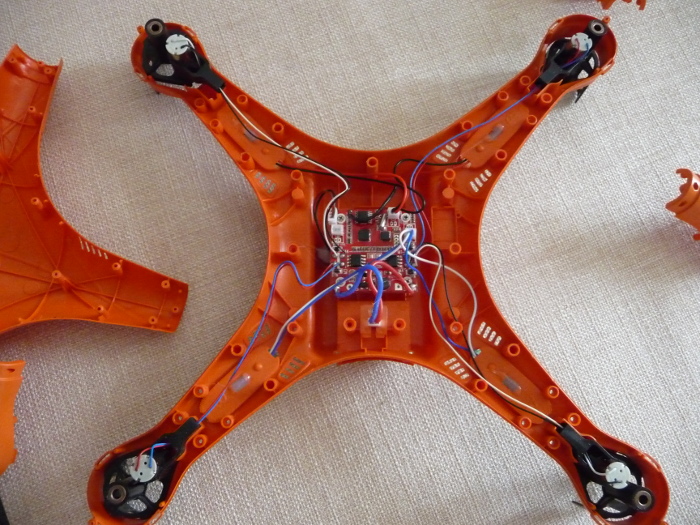
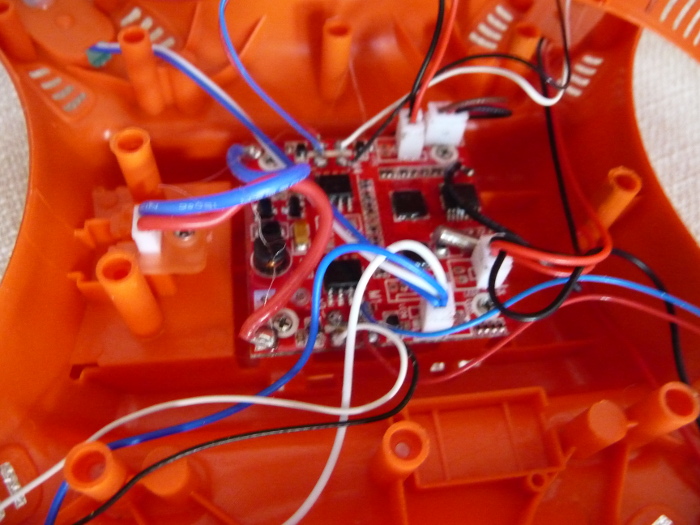
Aprendo cominciamo a notare come i contatti tra fili e, ad esempio, LED ed interruttori è coperto da un qualche colla o sostanza siliconica che nei isola i contatti.
Per quanto riguarda la scheda madre sembrerebbe non esserci nulla, tranne un colore più scuro su tutte le saldature.

Se andiamo a misurare la tensione trai morsetti + e – della scheda collegata alla batteria, troviamo subito la risposta: il tutto è rivestito da una vernice idrorepellente che isola ogni parte del circuito.
Rimane l’unico dubbio. Come fa la batteria a non cortocircuitarsi?
La risposta deriva dal fatto che il morsetto maschio della batteria che entra nella sede per alimentare il circuito è ad incastro e l’acqua fatica ad entrare per quelle fessure. Questo assicura che se il drone non rimane ammollo per un tempo eccessivo, anche la batteria si salva (più si lascia in acqua e più e probabile che l’umidità riesca ad entrare per le fessure).
Conclusioni
Il drone ha i suoi punti di spicco che di possono riassumere in:
- Nessun problema a sorvolare una distesa d’acqua o smettere di volare per l’arrivo di un pò di pioggia: l’acqua non lo ferma
- Grande adattabilità di volo con le 4 velocità che permettono un controllo in base alla propria abilità di volo o comunque che agevolano anche il volo indoor.
- Radiocomando di ottima fattura, pur essendo in plastica.
- Possibilità di aggiungere una telecamera e renderlo alla pari di un Syma X5C
Per contro i punti un pò migliorabili sono:
- La modalità di volo cruise control e headless mode al momento richiederanno altre sessioni di test per appurare il loro funzionamento
- Causa impossibilità di verificare a tensione sulla scheda madre per la vernice idrorepellente non si può verificare come mai in alcuni casi le luci rosse non si accendono per stabilirne la causa.
- L’atterraggio brusco su superfici dure, avendo un carrello di atterraggio molto alto, provoca più facilmente che il drone rimbalzi e si capovolga. Con lX5C questo è molto più raro.
Note riassuntive finali





 Recensione MGCOOL Explorer ES con risoluzione 3K
Recensione MGCOOL Explorer ES con risoluzione 3K  Recensione: XK X300 FPV in versione Wifi
Recensione: XK X300 FPV in versione Wifi  Recensione: Z201YS Mini con FPV e telaio pieghevole
Recensione: Z201YS Mini con FPV e telaio pieghevole  Recensione: Eken H8R 4K Action Cam
Recensione: Eken H8R 4K Action Cam  Recensione: Syma X8HG con camera da 8MP
Recensione: Syma X8HG con camera da 8MP  Recensione: JXD 509V
Recensione: JXD 509V  Drone Quadricottero: helifar FUUTON 2 FPV racer
Drone Quadricottero: helifar FUUTON 2 FPV racer  Drone Quadricottero: Watch Control Mini Foldable
Drone Quadricottero: Watch Control Mini Foldable  Drone Quadricottero: TYRC TY6 è realmente tascabile
Drone Quadricottero: TYRC TY6 è realmente tascabile  Drone Quadricotterto: JJRC JJPRO X5 professionale ad un super basso prezzo
Drone Quadricotterto: JJRC JJPRO X5 professionale ad un super basso prezzo
Salve, il blocco ingranaggi del Syma xc5 è compatibile con queswto modello?
ciao,
il syma ha l’ingranaggio grande che è più piccolo del H2O (ha 4 fori ai lati, contro i 6 dell’ H2O).
Quindi ci starebbe quanto a dimensione (ingombro), ma poi l’ingranaggio piccolo dove è ancorata l’elica probabilmente non si incontrerebbe con l’altro.
Non avevo però un calibro sotto mano per misurare il diametro esatto, se serve nel weekend posso fare la misurazione.